
- This event has passed.
INVITATION // IntCDC Constructive Conversations / Hannah Stuart
March 18 | 4:00 pm - 6:00 pm
Dear all,
We are very honored to welcome Hannah Stuart – Assistant Professor in the Department of Mechanical Engineering at the University of California at Berkeley – on Monday, March 18, 2024 from 4:00-6:00 pm in our upcoming Constructive Conversations event.
Hannah Stuart will give a lecture on “Designing mobile robots for physical interaction with sandy terrains”.
We cordially invite you to participate in the lecture:
| Title: | Designing mobile robots for physical interaction with sandy terrains |
| Speaker: | Hannah Stuart Assistant Professor at the University of California, Berkeley |
| Date: | March 18, 2024 | 4:00-6:00 pm |
| Event-Page: | https://www.intcdc.uni-stuttgart.de/news/events/IntCDC-Constructive-Conversations-brDesigning-Mobile-Robots-for-Physical-Interaction-with-Sandy-Terrains/ |
The location data for this event is available to AdvanceAEC network partners. All researchers working in the field of AdvanceAEC are warmly invited to join the network. Please register or log-in to your account to access the event credentials.
Lecture Abstract
One day, robots will widely support exploration and development of unstructured natural environments. Much of the work I will present in this lecture is supported by NASA and is focused on robot design research relevant to accessing the surfaces of the Moon or Mars. Tensile elements appear repeatedly across the wide array of missions envisioned to support human or robotic exploration and habitation of the Moon. With a single secured tether either rovers or astronauts, or both, could belay down into steep lunar craters for the exploration of permanently shadowed regions; the tether prevents catastrophic slipping or falling and mitigates risk while we search for water resources. Like a tent that relies on tensioned ropes to sustain its structure, tensegrity-based antennae, dishes, and habitations can be made large and strong using very lightweight materials. We ask: Where does the tension in these lightweight systems go? Ultimately, these concepts will require anchors that attach cables autonomously, securely, and reliably to the surrounding regolith to react tensile forces. Thus, the development of new autonomous burrowing and anchoring technologies and modeling techniques to guide design and adoption is critical across multiple space relevant programs.
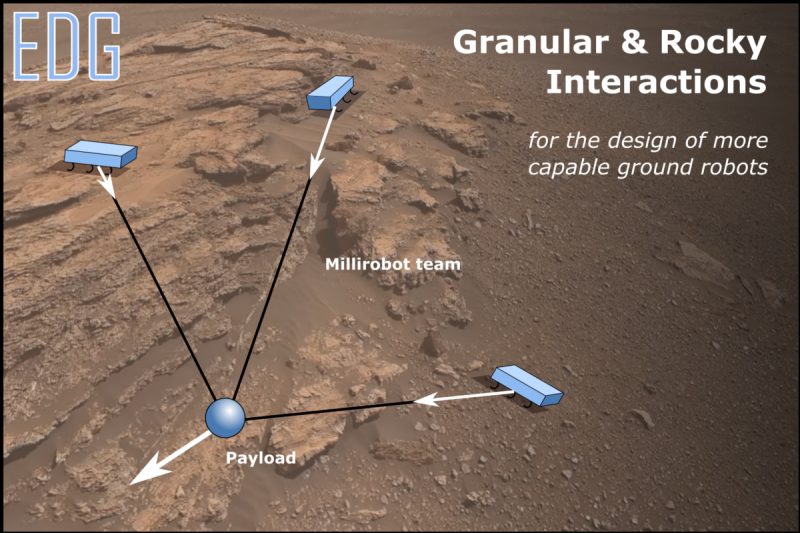
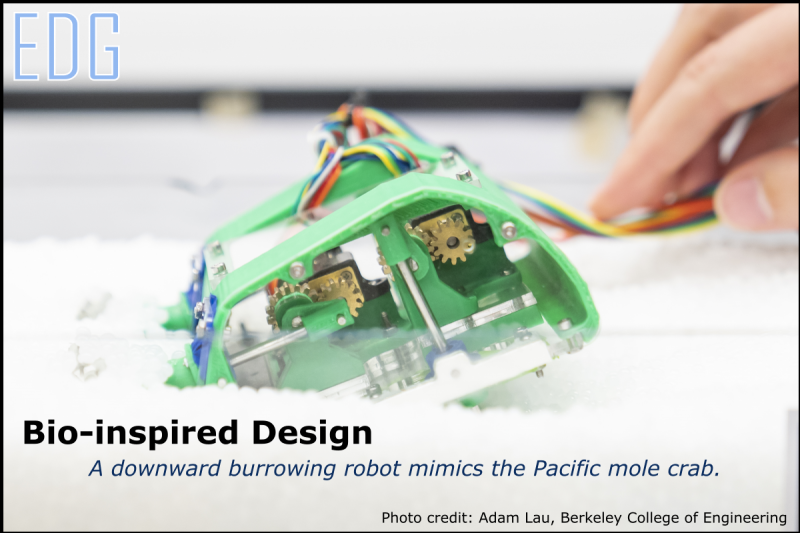
Yet burrowing and anchoring problems are hard for multiple reasons, which remain fundamental areas of discovery. Our goal is to understand how the mechanics of granular and rocky interaction influences the design and control small-scale robotic systems for such forceful manipulations. I will present new mobility and anchoring strategies to enable small robots to resist, or “tug,” massive loads in loose terrain, like regolith. The idea is that multiple tethered agents can work together to perform large-scale manipulations, even where traction and gravity is low. Resulting generalizable methods for rapidly modeling granular interactions also inform new mobility gaits to move over, through, or under loose sand more efficiently.

Hannah Stuart
Dr. Hannah Stuart is an Assistant Professor in the Department of Mechanical Engineering at the University of California at Berkeley. She received her BS in Mechanical Engineering at the George Washington University in 2011, and her MS and PhD in Mechanical Engineering at Stanford University in 2013 and 2018, respectively. Her research focuses on understanding the mechanics of physical interaction to better design intelligent systems for dexterous manipulation. Applications range from remote robotics to assistive orthotics. Recent awards include the NSF CAREER grant, NASA Early Career Faculty grant, Hellman Fellows Fund grant, and Johnson & Johnson Women in STEM2D grant. She is a Senior Member of the IEEE. She is currently a Visiting Professor with IntCDC, visiting Dr. Katherine J. Kuchenbecker in the Haptic Intelligence Department at the Max Planck Institute for Intelligent Systems until May.
We look forward to welcoming you!
Best,
IntCDC Management Team